
Background
Backpropagation is a common method for training a neural network. There is no shortage of papers online that attempt to explain how backpropagation works, but few that include an example with actual numbers. This post is my attempt to explain how it works with a concrete example that folks can compare their own calculations to in order to ensure they understand backpropagation correctly.
Backpropagation in Python
You can play around with a Python script that I wrote that implements the backpropagation algorithm in this Github repo.
Continue learning with Emergent Mind
If you find this tutorial useful and want to continue learning about AI/ML, I encourage you to check out Emergent Mind, a new website I’m working on that uses GPT-4 to surface and explain cutting-edge AI/ML papers:

In time, I hope to use AI to explain complex AI/ML topics on Emergent Mind in a style similar to what you’ll find in the tutorial below.
Now, on with the backpropagation tutorial…
Overview
For this tutorial, we’re going to use a neural network with two inputs, two hidden neurons, two output neurons. Additionally, the hidden and output neurons will include a bias.
Here’s the basic structure:

In order to have some numbers to work with, here are the initial weights, the biases, and training inputs/outputs:
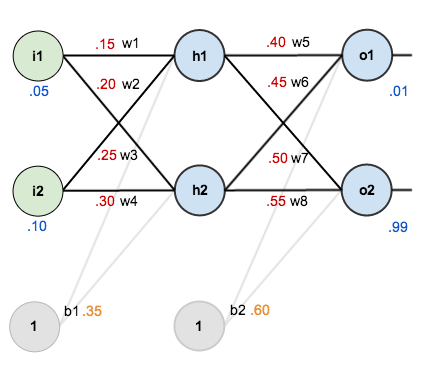
The goal of backpropagation is to optimize the weights so that the neural network can learn how to correctly map arbitrary inputs to outputs.
For the rest of this tutorial we’re going to work with a single training set: given inputs 0.05 and 0.10, we want the neural network to output 0.01 and 0.99.
The Forward Pass
To begin, lets see what the neural network currently predicts given the weights and biases above and inputs of 0.05 and 0.10. To do this we’ll feed those inputs forward though the network.
We figure out the total net input to each hidden layer neuron, squash the total net input using an activation function (here we use the logistic function), then repeat the process with the output layer neurons.
Here’s how we calculate the total net input for 


We then squash it using the logistic function to get the output of

Carrying out the same process for 

We repeat this process for the output layer neurons, using the output from the hidden layer neurons as inputs.
Here’s the output for 



And carrying out the same process for 

Calculating the Total Error
We can now calculate the error for each output neuron using the squared error function and sum them to get the total error:

 is included so that exponent is cancelled when we differentiate later on. The result is eventually multiplied by a learning rate anyway so it doesn’t matter that we introduce a constant here [1].
is included so that exponent is cancelled when we differentiate later on. The result is eventually multiplied by a learning rate anyway so it doesn’t matter that we introduce a constant here [1].For example, the target output for

Repeating this process for 

The total error for the neural network is the sum of these errors:

The Backwards Pass
Our goal with backpropagation is to update each of the weights in the network so that they cause the actual output to be closer the target output, thereby minimizing the error for each output neuron and the network as a whole.
Output Layer
Consider 

 is read as “the partial derivative of
is read as “the partial derivative of  with respect to
with respect to  “. You can also say “the gradient with respect to ”.
“. You can also say “the gradient with respect to ”.
By applying the chain rule we know that:

Visually, here’s what we’re doing:

We need to figure out each piece in this equation.
First, how much does the total error change with respect to the output?





When we take the partial derivative of the total error with respect to 

Next, how much does the output of
The partial derivative of the logistic function is the output multiplied by 1 minus the output:


Finally, how much does the total net input of 

Putting it all together:


You’ll often see this calculation combined in the form of the delta rule:

Alternatively, we have 





Therefore:

Some sources extract the negative sign from 

To decrease the error, we then subtract this value from the current weight (optionally multiplied by some learning rate, eta, which we’ll set to 0.5):

 (alpha) to represent the learning rate, others use
(alpha) to represent the learning rate, others use  (eta), and others even use
(eta), and others even use  (epsilon).
(epsilon).We can repeat this process to get the new weights 





We perform the actual updates in the neural network after we have the new weights leading into the hidden layer neurons (ie, we use the original weights, not the updated weights, when we continue the backpropagation algorithm below).
Hidden Layer
Next, we’ll continue the backwards pass by calculating new values for 



Big picture, here’s what we need to figure out:

Visually:
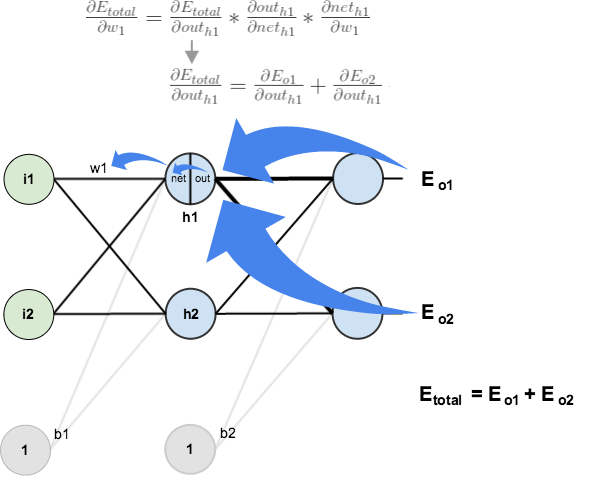
We’re going to use a similar process as we did for the output layer, but slightly different to account for the fact that the output of each hidden layer neuron contributes to the output (and therefore error) of multiple output neurons. We know that 




Starting with 

We can calculate 

And 

Plugging them in:

Following the same process for 

Therefore:

Now that we have 



We calculate the partial derivative of the total net input to


Putting it all together:

You might also see this written as:



We can now update

Repeating this for



Finally, we’ve updated all of our weights! When we fed forward the 0.05 and 0.1 inputs originally, the error on the network was 0.298371109. After this first round of backpropagation, the total error is now down to 0.291027924. It might not seem like much, but after repeating this process 10,000 times, for example, the error plummets to 0.0000351085. At this point, when we feed forward 0.05 and 0.1, the two outputs neurons generate 0.015912196 (vs 0.01 target) and 0.984065734 (vs 0.99 target).
If you’ve made it this far and found any errors in any of the above or can think of any ways to make it clearer for future readers, don’t hesitate to drop me a note. Thanks!
And while I have you…
Again, if you liked this tutorial, please check out Emergent Mind, a site I’m building with an end goal of explaining AI/ML concepts in a similar style as this post. Feedback very much welcome!

this is the best explanation about backpropagation that I’ve ever found. thanks!
Actually why is that? I don’t see the explanations here… to me the formula here is (output – target) * g'(z). And I still don’t know why I read in some other materials that the error term of the output layer is just (output – target).
Very nice explanation !
I hope you could clarify one thing. In your diagram, the same bias is applied to all perceptrons in a given layer (b1 is applied to h1 and h2 , b2 is applied to o1 and o2).
Is that the normal approach? Shouldn’t we have a bias per perceptron?
Thanks a lot !
It appears there are several ways of doing it. One way is a single bias setting, no weights, to all nodes.
Another is, as above, using one setting for each layer. Equal to that would be ONE bias (of say 1) but different weights to each layer.
Yet another is one setting, but unique weights to each node.
Since the only goal is to help the logistic or sigmoid function not pass through the origin, they all work – but I think the reason to have them be different is to avoid shifting the entire function to the right or left simultaneously at all nodes, forcing adjustments to be very miniscule. With different weights, it offers the chance to adjust different nodes in different ways.
This example doesn’t include it, but some people also update the weights on the bias settings.
Awesome tutorial!
best resource on understanding back propagation I have came across.
Thank u for such a needful explanation
This valuable explanation saved a lot of time…Thanks a lot for the very clear explanation of BP function.
Thank you for the great tutorial!
When you do:
d(E_total) / d(out_o1) = 2 * 1 / 2 * (target_o1 – out_o1)^(2-1) * -1 + 0
Where does the part >> * -1<< come from ???
@henry
(Fog)’ = g’ * (f’og)
With g being a-x g’ is -1
F being (a-x)^2
F’og is 2 (a-x)
You are getting the derivative with respect to output_o1. It is a variable with a negative sign, meaning (-1 * output_o1). If you take the derivative of a variable whose degree is 1 (a variable without an
exponent actually has an exponent of 1), you will have a constant which is -1 here.
Very clear tutorial. Thank you very much
All examples I can find online shows an explanation of a single data set. How do you train an ANN with let’s say two data sets, as such the weights for both data sets are the same, but it yields the correct results for each data set?
Thank you very much.
Very insightful. Great work.
Thank you so much ! Couldn’t be better :))
Awesome stuff. Exactly what beginners need.
Very good explanation
This is a great tutorial. One thing that will help is to explain why the error rate only goes down and why the error does not increase. What forces the error to go down in every iteration. Why should we expect it to go down.
I believe it has to do with the slope. When the slope is negative then it causes the learning rate to add and when the slope is negative it cases the learning rate to subtract from the original rate.
This is a great tutorial. I think it will be clearer if you can explain why the error rate only goes down with each iteration (assuming there is only one equilibrium). How the slope directions contributes to ensuring that each iteration decreases the cost?
Matt, very good tutorial !!
Q: how do you apply back propagation on batches? lets say I feed forward 50 training examples from my data set, I calculate the errors for each, then do I take average Error and do the back prop? Thanks
Matt, how does BackPropagation work with batches of training data? If I do 50 training samples per batch, do I take the average of the errors and do the back prop ? thanks
Super clear explanation 👍🏻
Thank you very much for this example, it has made the concept so much more clear!
Great Tutorial. Thanks a lot :)
I got a solution after 2 months learning.. :) Thank you very much..
Very Very good
Hey there, I want to have an output value 2.5 but using the equations above I only get output value 1. What should I do now?? I have set the target value 2.5 but also get output value 1.
Thank you. I was studying for 2 weeks without understanding this. You saved me.
I’m stuck. How do I update the bias?
Thank you, Professor.
Reblogged this on Julian Frank's Blog and commented:
A Really Good Step by step Explanation of Back Propagation in Neurons
Ignoring the whole backpropagation thing, I don’t even understand how we could ever wind up with 0.01 as final output. Using the “squash” logistics function above, even when all inputs and weights are zero, we get 0.5 as output. You can’t ever go below 0.5 this way. What am I missing?
The weight can be negative. ;)
Oh, right! Now that you mention that, it seems obvious. Thanks!
You give theory and practice. Very very useful.
Thanks, thanks, thanks.
While each forward path of an neuron to neurons of next layer has its own weight, why is there only one bias weight shared by the whole layer?
awesome explanation
Thanks a lot for nice Explanation for beginners.
Muneeswaran.G
Thanks a lot. but i dont’ understand this “Consider w_5. We want to know how much a change in w_5 affects the total error, aka \frac{\partial E_{total}}{\partial w_{5}}.”
Can you explain more?
many Many thanks. The most simple and also analytic explanation of backpropagation algorithm. I was looking for a tutrial like this for months!!!! Thank you again
very much thankyou
Thanks a lot! Was looking for an in-depth example for a long time!
Great tutorial!
But how can I update biases using back propagation ?
You can imagine biases as weights of a neuron that always outputs 1.
Same way. Just take the partial with respect to the bias instead of the weight.
It’s easy to generalize the method accroding to weight update. You just need use the similar way to calculate dEtotal/dbias to get the step for bias and update it.
very good
The best explanaition of backpropagation I’ve read! Really helped me, thank you!
Thank you thank you thank you.
Just about to give up trying to understand back prop, before I saw this.
Thank you thank you thank you.
Just about to give up trying to understand back prop, before I saw this.