
Background
Backpropagation is a common method for training a neural network. There is no shortage of papers online that attempt to explain how backpropagation works, but few that include an example with actual numbers. This post is my attempt to explain how it works with a concrete example that folks can compare their own calculations to in order to ensure they understand backpropagation correctly.
Backpropagation in Python
You can play around with a Python script that I wrote that implements the backpropagation algorithm in this Github repo.
Continue learning with Emergent Mind
If you find this tutorial useful and want to continue learning about AI/ML, I encourage you to check out Emergent Mind, a new website I’m working on that uses GPT-4 to surface and explain cutting-edge AI/ML papers:

In time, I hope to use AI to explain complex AI/ML topics on Emergent Mind in a style similar to what you’ll find in the tutorial below.
Now, on with the backpropagation tutorial…
Overview
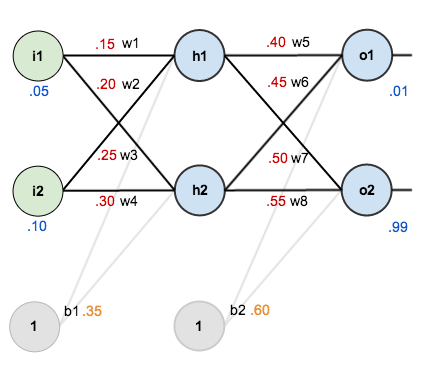
For this tutorial, we’re going to use a neural network with two inputs, two hidden neurons, two output neurons. Additionally, the hidden and output neurons will include a bias.
Here’s the basic structure:

In order to have some numbers to work with, here are the initial weights, the biases, and training inputs/outputs:
The goal of backpropagation is to optimize the weights so that the neural network can learn how to correctly map arbitrary inputs to outputs.
For the rest of this tutorial we’re going to work with a single training set: given inputs 0.05 and 0.10, we want the neural network to output 0.01 and 0.99.
The Forward Pass
To begin, lets see what the neural network currently predicts given the weights and biases above and inputs of 0.05 and 0.10. To do this we’ll feed those inputs forward though the network.
We figure out the total net input to each hidden layer neuron, squash the total net input using an activation function (here we use the logistic function), then repeat the process with the output layer neurons.
Here’s how we calculate the total net input for 


We then squash it using the logistic function to get the output of

Carrying out the same process for 

We repeat this process for the output layer neurons, using the output from the hidden layer neurons as inputs.
Here’s the output for 



And carrying out the same process for 

Calculating the Total Error
We can now calculate the error for each output neuron using the squared error function and sum them to get the total error:

 is included so that exponent is cancelled when we differentiate later on. The result is eventually multiplied by a learning rate anyway so it doesn’t matter that we introduce a constant here [1].
is included so that exponent is cancelled when we differentiate later on. The result is eventually multiplied by a learning rate anyway so it doesn’t matter that we introduce a constant here [1].For example, the target output for

Repeating this process for 

The total error for the neural network is the sum of these errors:

The Backwards Pass
Our goal with backpropagation is to update each of the weights in the network so that they cause the actual output to be closer the target output, thereby minimizing the error for each output neuron and the network as a whole.
Output Layer
Consider 

 is read as “the partial derivative of
is read as “the partial derivative of  with respect to
with respect to  “. You can also say “the gradient with respect to ”.
“. You can also say “the gradient with respect to ”.
By applying the chain rule we know that:

Visually, here’s what we’re doing:

We need to figure out each piece in this equation.
First, how much does the total error change with respect to the output?





When we take the partial derivative of the total error with respect to 

Next, how much does the output of
The partial derivative of the logistic function is the output multiplied by 1 minus the output:


Finally, how much does the total net input of 

Putting it all together:


You’ll often see this calculation combined in the form of the delta rule:

Alternatively, we have 





Therefore:

Some sources extract the negative sign from 

To decrease the error, we then subtract this value from the current weight (optionally multiplied by some learning rate, eta, which we’ll set to 0.5):

 (alpha) to represent the learning rate, others use
(alpha) to represent the learning rate, others use  (eta), and others even use
(eta), and others even use  (epsilon).
(epsilon).We can repeat this process to get the new weights 





We perform the actual updates in the neural network after we have the new weights leading into the hidden layer neurons (ie, we use the original weights, not the updated weights, when we continue the backpropagation algorithm below).
Hidden Layer
Next, we’ll continue the backwards pass by calculating new values for 



Big picture, here’s what we need to figure out:

Visually:
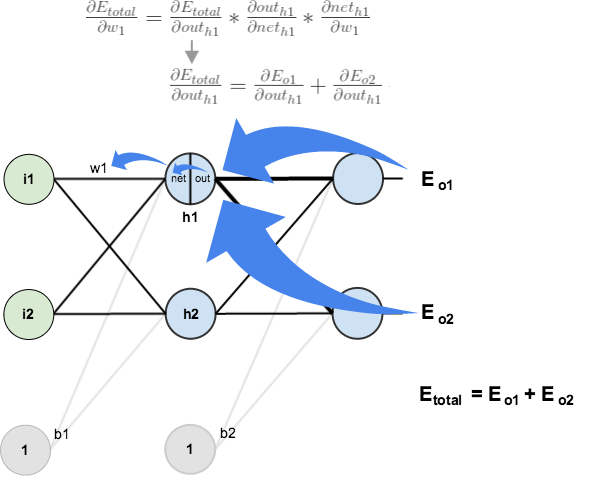
We’re going to use a similar process as we did for the output layer, but slightly different to account for the fact that the output of each hidden layer neuron contributes to the output (and therefore error) of multiple output neurons. We know that 




Starting with 

We can calculate 

And 

Plugging them in:

Following the same process for 

Therefore:

Now that we have 



We calculate the partial derivative of the total net input to


Putting it all together:

You might also see this written as:



We can now update

Repeating this for



Finally, we’ve updated all of our weights! When we fed forward the 0.05 and 0.1 inputs originally, the error on the network was 0.298371109. After this first round of backpropagation, the total error is now down to 0.291027924. It might not seem like much, but after repeating this process 10,000 times, for example, the error plummets to 0.0000351085. At this point, when we feed forward 0.05 and 0.1, the two outputs neurons generate 0.015912196 (vs 0.01 target) and 0.984065734 (vs 0.99 target).
If you’ve made it this far and found any errors in any of the above or can think of any ways to make it clearer for future readers, don’t hesitate to drop me a note. Thanks!
And while I have you…
Again, if you liked this tutorial, please check out Emergent Mind, a site I’m building with an end goal of explaining AI/ML concepts in a similar style as this post. Feedback very much welcome!

Very, nice.
Did not succeed at first, because i was using 0 and 1 in one of inputs.
I figured out that 0 does not adjust weight.
So i shifted inputs by 0.5 (-0.5 and 0.5 instead 0 and 1) and it worked.
That is precisely why biases are used.
Hi Matt,
One question. In this article you calculate the Error function at the end of the forward propagation process as
E_{total} = \sum \frac{1}{2}(target – output)^{2}
I understand that this way of calculating the Error function was mostly used in the past and now we should use cross entropy. However, getting back to the squared error function – because the difference between the target and output is power 2, the result is always positive (regardless whether target > output or vice versa). That means that regardless that the actual network output result (target – output) can be positive error or negative error, we always back propagate the positive E function and eventually use the fractions of it at any neuron to adjust its weight and bias.
So, the adjustment goes always in one direction. Since it was successfully used in the past, how that worked? Or getting back to your example, we can use different input number and come up with negative (target – output) but the Error function will still be positive, and so the weight and bios adjustments for each neuron.
Regards
Igor
The squared error is always positive. But for backpropagation you use the (partial) derivative of the error function, which is linear and hence can be positive or negative.
Man I’m studying for a final and this explained the algorithm better than the textbook. you’re actively the best
Amazing explanation!! can you please explain in the similar fashion about updating the bias. As i am confused bias is only for a layer how can we update for every neuron??
So what happens next? What do you mean by “after repeating this process 10,000 times, for example, the error plummets to 0.0000351085”? Should we keep using the same input record in all these 10000 iterations? I think I understood what has been explained by this text, but I wish you could ellaborate a bit more on the whole neural network learning process.
Also, can you provide a general idea on what is happening in your neural network visualization example? What were you feeding the network during all those many iterations?
Sorry for asking so many questions, it’s just I’m trying to get a deep understanding on this topic, but failing to find quality material that isn’t too difficult for beginner like me.
Thank you.
So what happens next? What do you mean by “after repeating this process 10,000 times, for example, the error plummets to 0.0000351085”? Should we keep using the same input record in all these 10000 iterations? I think I understood what has been explained by this text, but I wish you could ellaborate a bit more on the whole neural network learning process.
Also, can you provide a general idea on what is happening in your neural network visualization example? What were you feeding the network during all those many iterations?
Sorry for asking so many questions, it’s just I’m trying to get a deep understanding on this topic, but failing to find quality material that isn’t too difficult for beginner like me.
Thank you.
this network doesn’t work well, my outputs are exactly like the example above, but training 16000 inputs for xor problem, the error is still very big, with another net I got very small error with 2000 inputs and i didnt even touch eta
If I get your question correctly you’re asking, whether to keep using the same input for all training cycles, then the answer is no. The network learns by example. The more examples you show the more it will learn. If you only show one example, that’s the only case it will be able to work with. Depending on the complexity of the task you might need to teach tens of thousands of different samples throughout training. In some cases, it is appropriate to show the same sample multiple times. E.g. if you want to train XOR (you need at least one hidden layer for this) you have the possible samples (0,0 => 0) (1,0 => 1) (0,1 => 1) and (1,1 => 0). You run them in some random order until you have reached an error rate you’re comfortable with.
why should it be called backpropagation if you don’t update the weights after you calculed them? you can easily perform this operation from the input layer to the output layer and get the same result… are you sure about “we use the original weights, not the updated weights, when we continue the backpropagation algorithm below” ?
Updating and backpropagation are two separate steps. Backpropagation pushes the error back through the network to find out how much responsibility to assign to each weight. This responsibility is then used to update the weights. You can interleave backpropagation and update for each layer, but first, you have to calculate the error for the next layer before you can do the update.
Great explanation! Short and clear!
Great simpification a NN to a two layer single data structure. It’s really easy to learn for beginner. Thanks man.
Great tutorial just finished going through the math and managed to reproduce the calculation. Only a matter of time until I master it.
This was seriously helpful. Thanks for writing it!
why bias weight is not updated?
Simple and intuitive explanation !! This is what I was looking for. Thank you.
Really good tutorial! One of the most helpful ones I’ve come across.
Does the bias unit in each layer have only one weight or would there be a separate weight per connection with the nodes?
Man you explained it all, i have finally succeeded to implement hidden layer backpropagation now. THANKS!
Maybe I missed it, but I think you left out the update of the biases. It’s simple but still might not be obvious to everyone new to the topic.
hi, i have two questions:
1) how do u ensure differentiating give the minimum value? instead of giving the maximum value?
2) Won’t differentiating it once give the lowest maximum value? which is the smallest error. why do we have to differentiate it 10000 times?
thanks, from singapore here!
Dear sir,
Error should be:
Error=(1/2)(out-target)^2
isn’t it?
sorry it’s correct
Hi..A very useful article..I have a doubt with calculating error for o1 . Here I am getting a negative value (-0.2747). Kindly help me here. Thanks in advance.
Thank you for this great tutorial.
for those who ask about bias updating you may assume the weights of bias as W’ 1 , W’ 2 , W’ 3 , W’ 4 and then apply same process on them
This is the best explanation of backward propagation I ever read.!!
This is so far the best explanation of backprop I read so far. Thankyou so much for this!
“We can calculate \frac{\partial E_{o1}}{\partial net_{o1}} using values we calculated earlier: ” whats going on here? how do i get the result?
Great explanation btw
The best one so far !!!
This blog is the best of the best explanation I have found in decoding backprop. Everybody was giving their own formula and I was not able to grasp the intuition but this post really helped me what is happening inside. Thank you for helping people.
Amazing explanation!
Though I used some random inputs and set the target values to double the input values (so the first output of the network is double the value of the first input, and the second output is double the value of the second input). It worked perfectly for specific input values. For example [0.03,0.09] would output very close to [0.06,0.18].
Though when I ran the algorithm in a loop many times, then tested the network (i.e. without using backprop and target values) it just outputted the same values that were outputted in the last iteration of the loop, rather than doubling the new values I inputted into the network.
So basically it only worked when I ran the backprop with the target values – though I want it to work without the target values!
Can anyone suggest anything? Sorry if I’m not being very clear, I’d be happy to explain myself if anyone is confused about what I mean.
Don’t worry, I worked it out! I was backpropagating too much for each pair of inputs, and not putting enough test inputs in. I should’ve been backpropagating alot less and using alot more test inputs!
Hi
I really don’t get how you calculate this line
\frac{\partial E_{total}}{\partial out_{o1}} = 2 * \frac{1}{2}(target_{o1} – out_{o1})^{2 – 1} * -1 + 0
I’m sure it is really simple, but cannot figure it out. Thanks for your help!
Yeah, im stuck at this part too. Cant figure it out..
That’s how you calculate the partial derivative:
https://www.derivative-calculator.net/#expr=1%2F2%28x-y%29%5E2%20%2B%201%2F2%28z%2Bt%29%5E2&diffvar=y&showsteps=1
First you get derivative of the outer function, then you multiply by the derivative of the inner function (which results in -1). And finally the derivative of the second part of the equation is 0 since it considered as a constant.
it is just the first derivative of the error.
Thanks for the great guide. I programmed a neural network based on this tutorial.
Here is a hint for programmers, so you can save some debugging time:
When calculating this value:
out_h1 * (out_h1 – 1)
out_h1 will sometimes be 1 if the sum of the inputs of a neuron is too high. You’ll end up with 0, which means you won’t update the weights.
Make sure to set this value to 0.0001 if it ends up being 0.
hello, i think this step is not correct?
partial out1/partial net1 = out1*(1-out1)
should equal with: net1*(1-net1)?
Reblogged this on josephdung.
Do u have RNN bptt tutorial? That’s hard to know. Thx
Simple amazing. Thanks a lot for a nice worked out example.
There is a mistake in the updated weights w6, w7
w6 = ~0.40891648
w7 = ~0.51137012
There is a mistake in the calculations of w6 and w7
w6 = ~ 0.40891648
w7 = ~ 0.51137012
Hi Matt, why when you take the partial derivative of the total error with respect to out1, you multiply by (-1)??
Thanks you
Read this post with this http://neuralnetworksanddeeplearning.com/chap2.html one together will help you get a better understanding of backpropagation.
Thanks. I think I finally got a grasp on backpropagstion. The only thing missing is the notation via vectors and matrices, but those shouldn’t be to difficult.
I rescind my previous agreement with Christophe. The -1 in the equation:
\frac{\partial E_{total}}{\partial out_{o1}} = 2 * \frac{1}{2}(target_{o1} – out_{o1})^{2 – 1} * -1 + 0
comes from the chain rule of differentiation. Which says: derivative of f(g) is
f'(g) * g’
In this case, we are taking the partial derivative with respect to out1, which makes f be 1/2(g)^2, with g being (target – out1). So the derivative is
1/2 * 2 * (target – out)^1 * -1
And the zero of course comes from the fact that those parts of the equation are not dependent on out1 at all and are thus constant with derivative zero.
Thank you! This is by far the best explanation on the topic I have seen. Is there any chance of adding a PrintFriendly/PDF link of this article? I would love to have this on my desk as a reference.
You explained so nice, thank you so much!
How come when I run the XOR problem, the error I get never goes below < 0.50? Even after 5000 iterations, it keeps come out to be around .50.
Very useful article. Thanks.
Hey. I think there is a problem with this explanation.
Shouldn’t d(E(total))/d(out h1) be equal to [d(E(total))/d(Eo1)* (d(Eo1)/d(out h1))] + [d(E(total))/d(Eo2)* (d(Eo2)/d(out h1))].
But it is given to be just (d(Eo1)/d(out h1) + (d(Eo2)/d(out h1)
Or am I wrong? Please help
Awesome tutorial. I really understood ” propagating the error backwards” concept for the first time.